Concept and Specifications
Concept
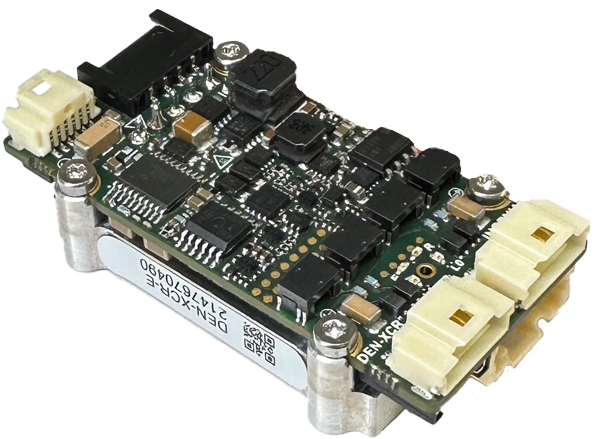
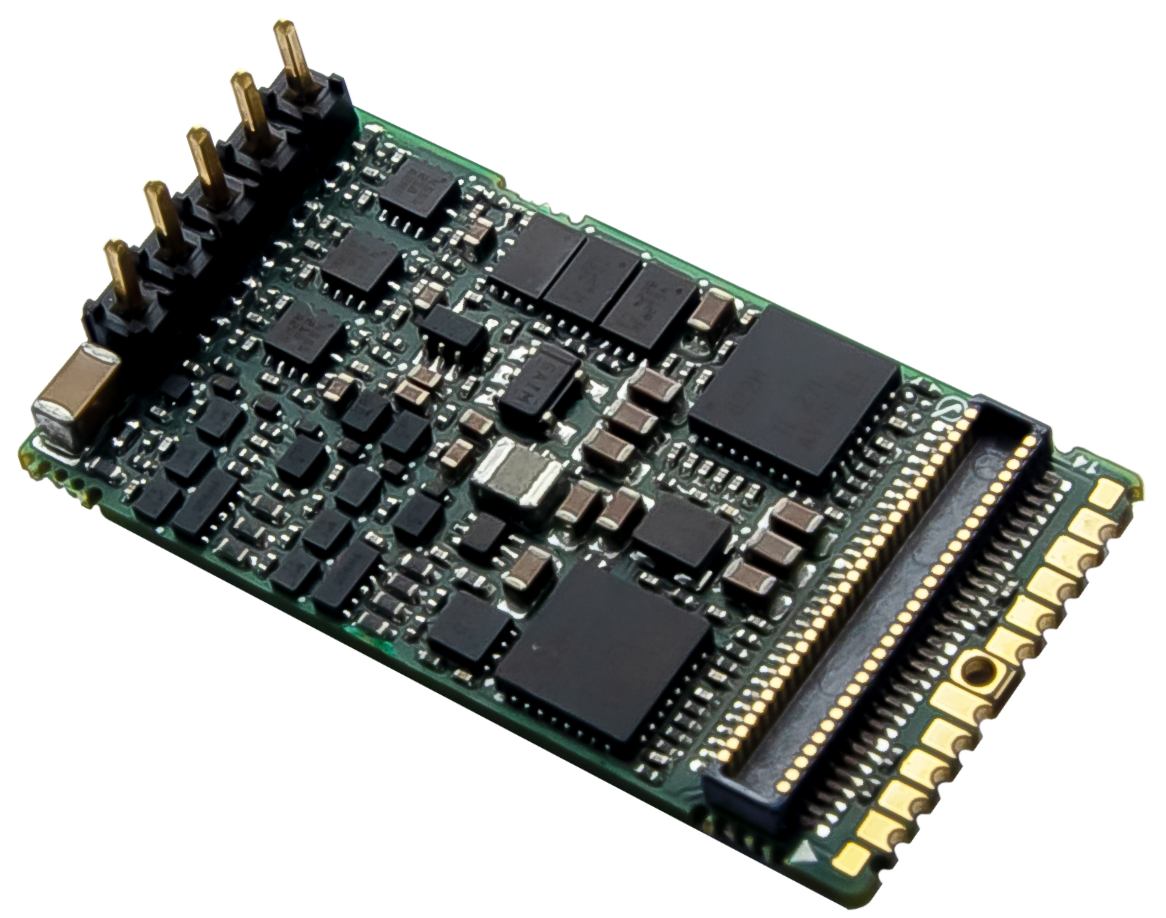
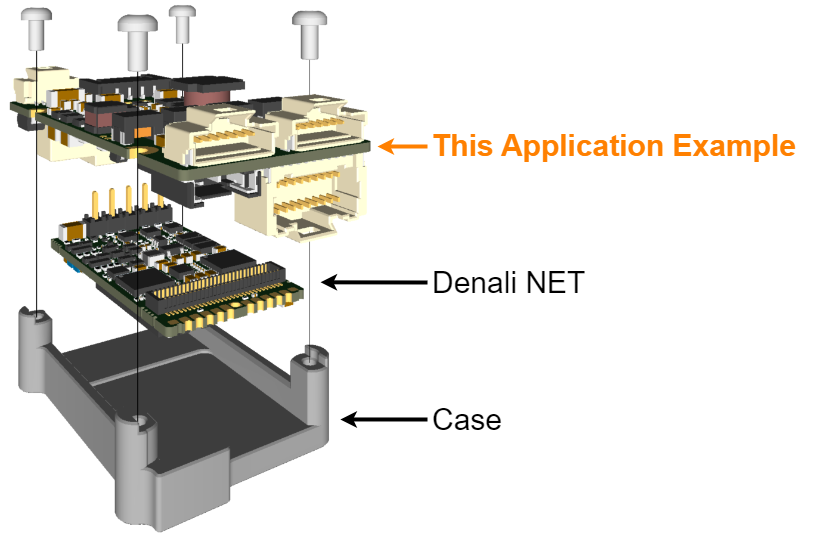
Among the Summit Collection of drives, each drive series includes an “XCR” version. XCR versions use a “NET” module including the power stage, the motion controller, and the communications layer, topped with an additional circuit board including all the connectors, transceivers, and adapter electronics required to interface almost all the features packed inside the drive. The present application example covers the interface board for the Denali NET miniature drive.
Although compact and confined, the proposed interface board is intended to grant access to a multi-purpose set of features; it does not respond to the needs of a specific application but poses a universal approach by which the Denali NET can be adapted to a wide variety of application scenarios where horizontal connectivity is eligible. It is ready to deliver the full current rating of Denali NET, provides connectivity for both EtherCAT and CANopen product versions, contains the required DC/DCs to allow for a single supply scheme, and includes all the necessary protections to make the drive rugged in front of a harsh electrical environment.

Typical application: surgical robot end effector
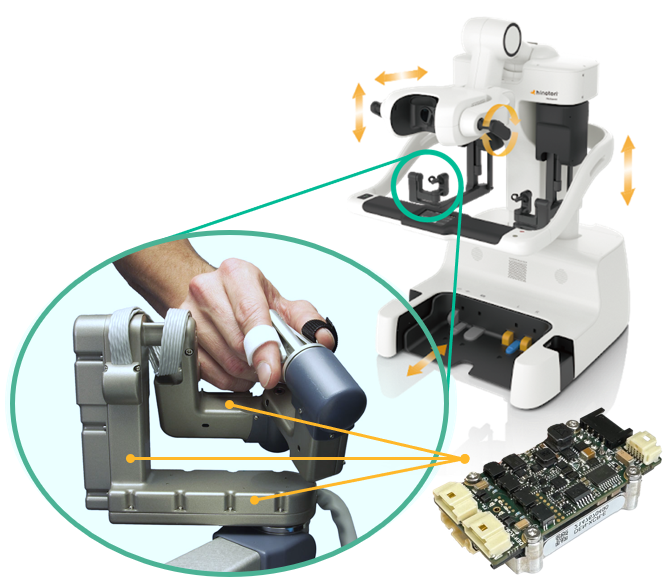
Typical application: haptic robot console
By means of the present guide, this versatile interface board is made freely available to anyone who wants to start straight using the Denali NET Summit drive. Usage details, design criteria, and general advice are given through the following pages.
Specifications
See the Mechanical Specifications section of this guide for further details on the physical characteristics of the design.
Refer to the links below to get the full set of resulting features and specifications for the combination of this interface board with each of the compatible Summit drives.