
LEDs Signalling
Overview
Onboard LEDs can be used to retrieve information on the operational state of the drive. Even if the LEDs are hidden from sight in the final application, their inclusion still provides valuable visual help during the development stage and troubleshooting or debugging afterward.
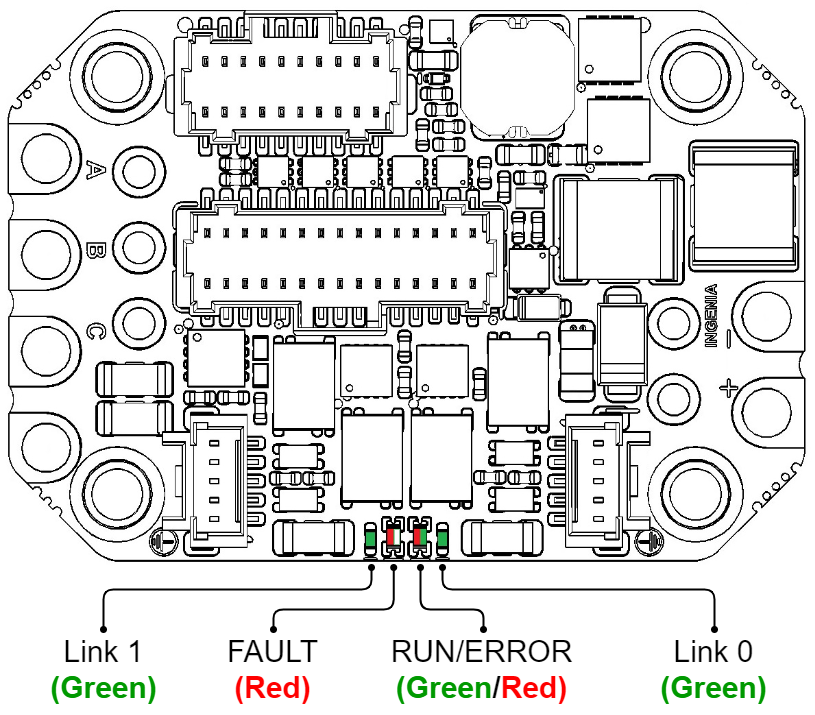
The following diagram represents the physical location of each LED on the TOP side of the proposed design.
LED | Type | Color | Description |
|---|---|---|---|
Link 1 | Single | Green | EtherCAT Port 1 (output) link LED Ethernet Port 1 link LED |
FAULT (Drive status) | Bi-Color (only 1 used) | (Green, unused) / Red | Drive FAULT State LED is on when an error event has occurred and the drive is trapped in the Fault state. |
RUN/ERROR (Network status) (Behaviour differs from EtherCAT drives to CANopen drives). | Bi-color | Green / Red | EtherCAT Status (ECAT Status) or CANopen status
|
Link 0 | Single | Green | EtherCAT Port 0 (input) link LED. Ethernet Port 0 link LED (only Everest NET) |
Find out more about the behavior of these signals along the whole range of Summit drives in the LED Signaling chapter of the Application Guide.