
Mechanical Specifications
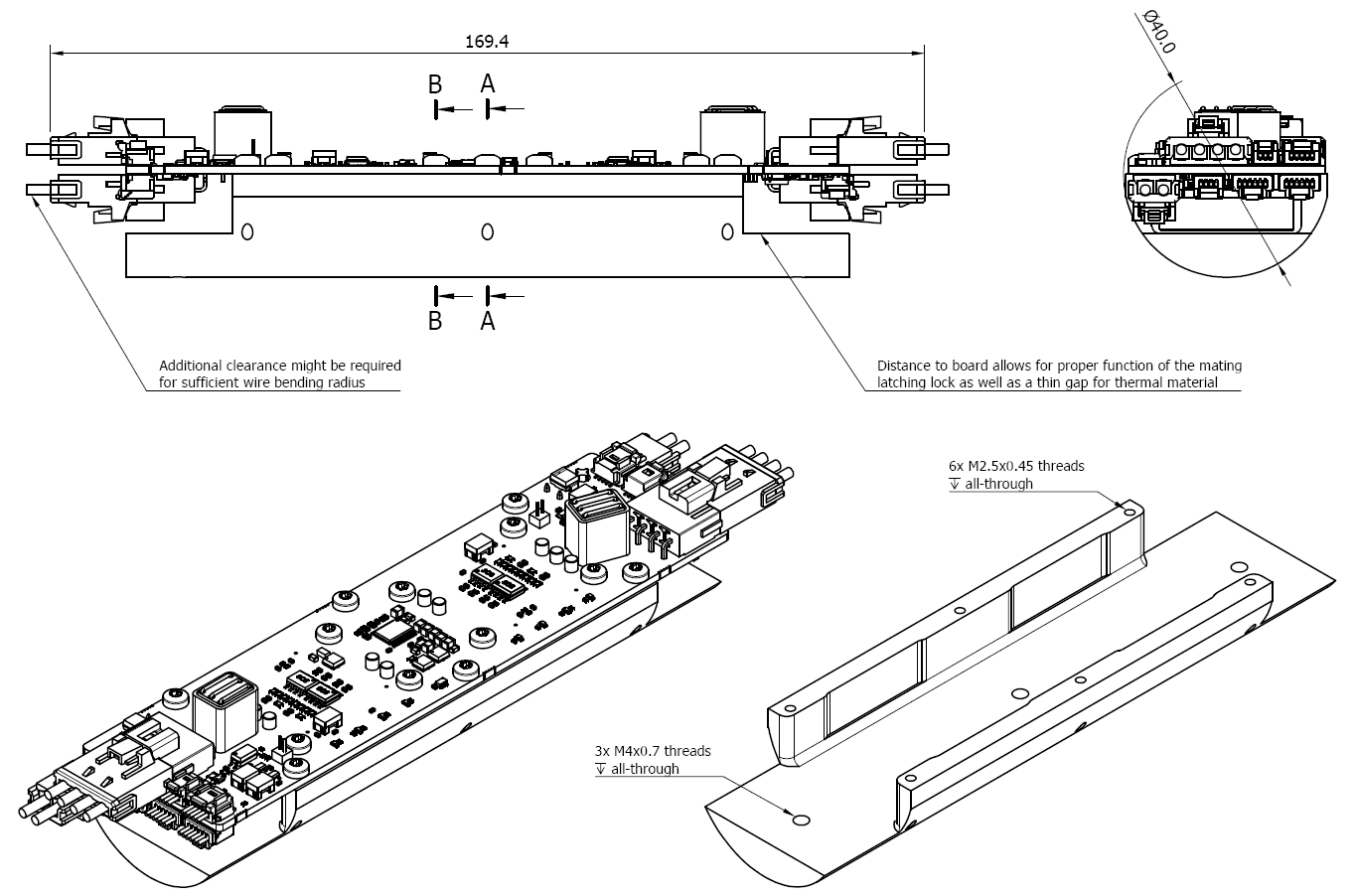
The drawings below show the actual dimensions of the design, including mating connectors, plus a proposed chassis to hold to a round tube. This last one can be inserted inside a tube with a minimum recommended diameter of 40 mm. Still, the design does not need to be fixed to a tube: other shapes are perfectly valid, including those where the board can be directly fixed to the chassis of the robot with no need for an adapter piece. See the Installation chapter for more indications.
All drawings and 3D models can be downloaded here.
All shown dimensions are in mm. All tolerances are ≤ ±0.2 mm.
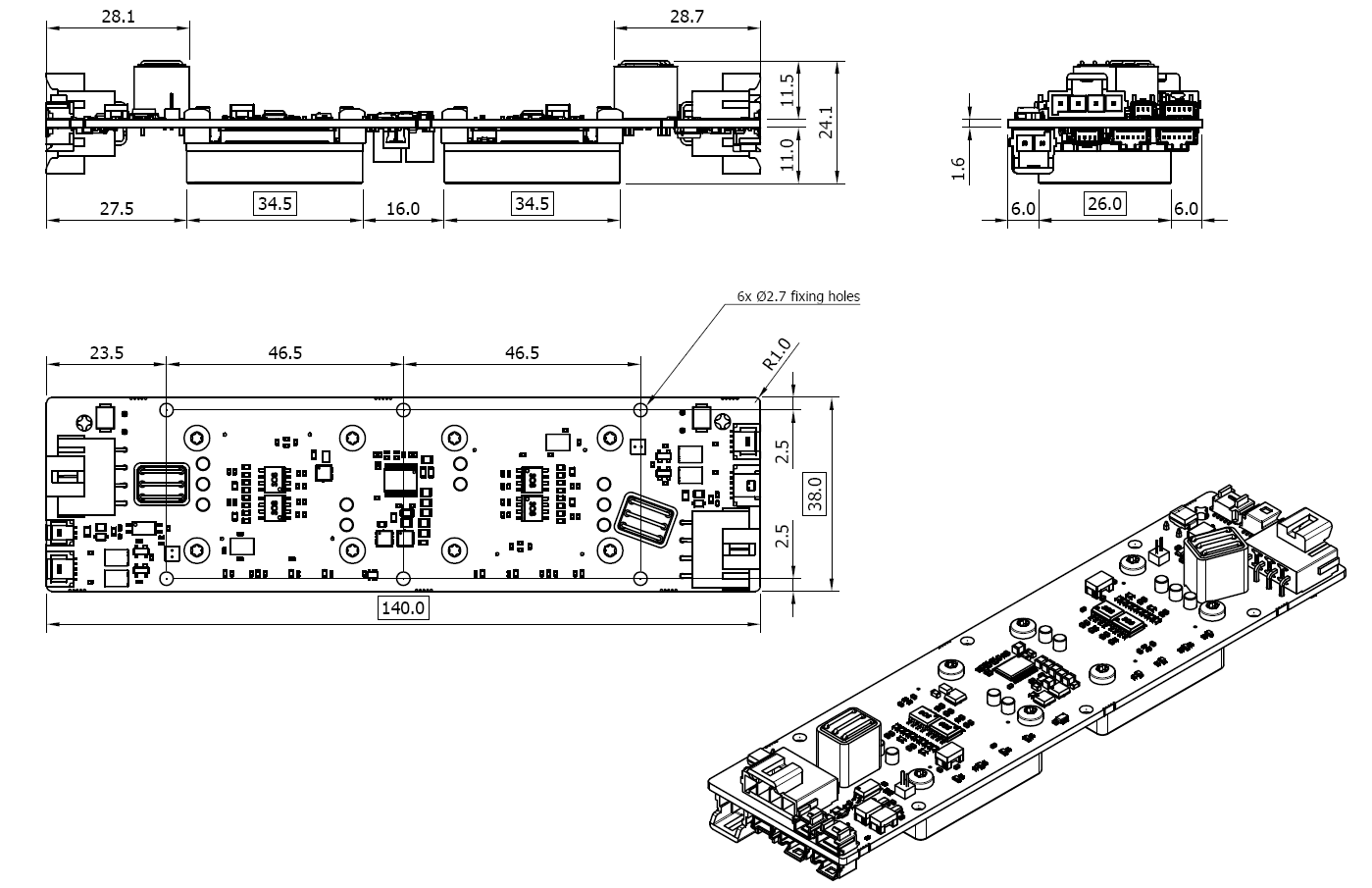

The interface board alone (no drives, no fixing elements, no mating connectors or wires) has a weight of 48 g.