
About this Guide
This document is associated and shall be used together with the main Summit Designer Application Guide.
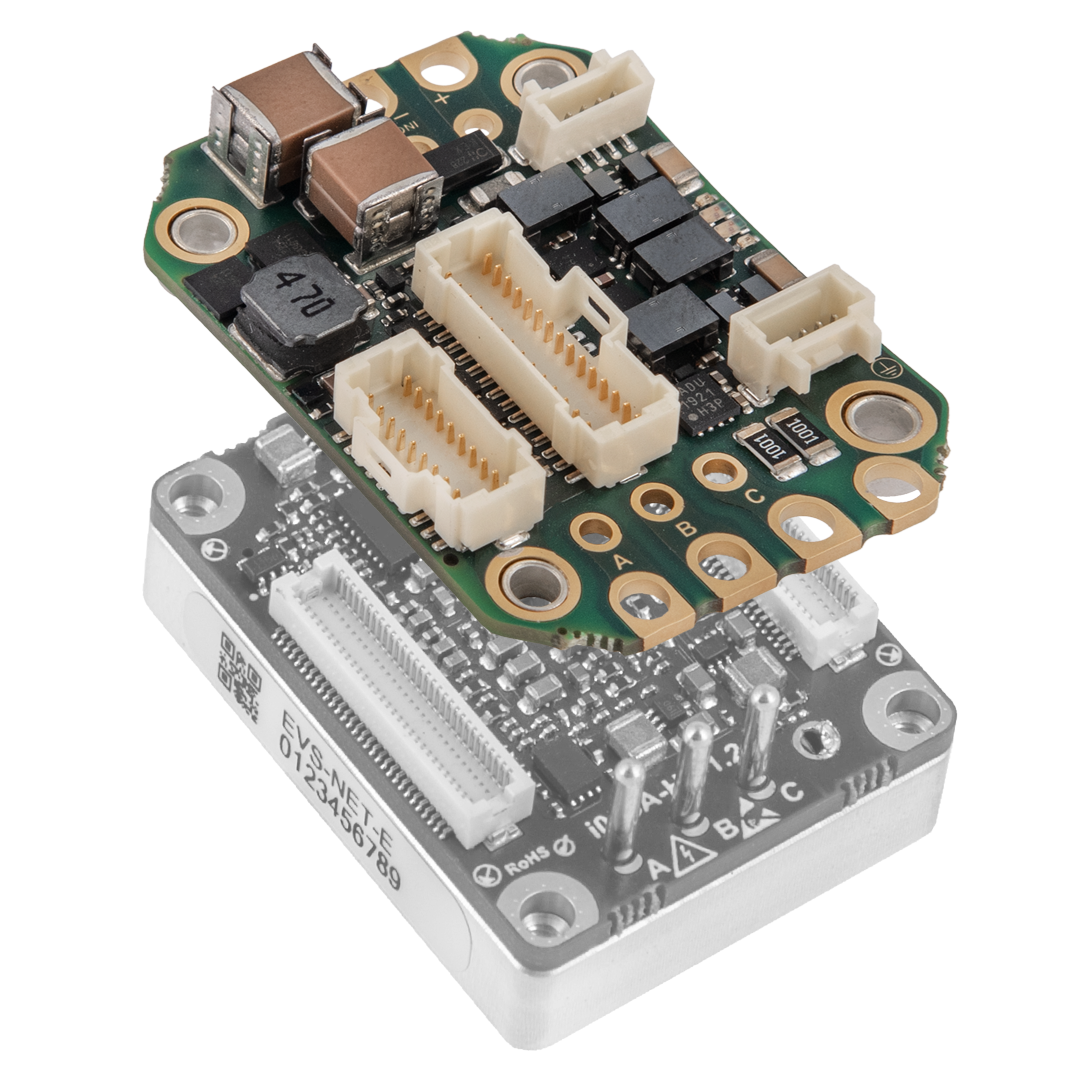
Its purpose is to serve as a complementary guide, where some of the circuits, recommendations, and resources from the main Application Guide are implemented into the resolution of a specific application; in this case, a single-axis interface board compatible with Capitan NET, Everest S NET, and Everest NET. The Guide offers the set of resources required to obtain a manufacturable design of a practical PCB capable of interfacing most of the features and capabilities of the drive and ready to be embedded in a minimal space inside one or more of the robot's mechanical links.
Not only context design notes and criteria are given, but the full project fonts including Schematic, PCB layout, Manufacturing outputs, and 3D Models are available to download. Hence, the user does not need to start from scratch, taking the risk of making errors in the process, but only modifying a finished and tested design with the minimum changes required to adapt it to a specific context.
By means of the proposed circuit board, the advanced motion control capabilities and cutting-edge power density of Capitan, Everest, and Everest S get ready to use, which in combination with the inherent benefits of an EtherCAT and CANopen networks, make the best possible deal to embed a state-of-the-art smart servo drive in the smallest volume.
To have the most up-to-date information, always use this Design Guide in combination with the Capitan NET, Everest S NET, and Everest NET Product Manuals.